In a VTOL vehicle (like a helicopter, a Portable Flyer etc) an unconventional frame extending above any main rotors (those providing the lift) offers new opportunities in safety and architecture/design.
The main rotor of a conventional helicopter divides the space into an area above the main rotor and an area underneath the main rotor wherein the fuselage (or the load) is. The area above the main rotor is not accessible:
In a PatTol helicopter:
the frame extends (through the hollowed hub of the main rotor) into the area above the main rotor, providing support to auxiliary / safety equipment.
The deployment of a rescue parachute (stored, during the flight, into a cage secured onto the frame above the main rotor) is rid of the obstacle of a rotating, above it, rotor:
A tail boom arranged in the area above the main rotor and having a tail rotor at its end, gives new design and safety options.
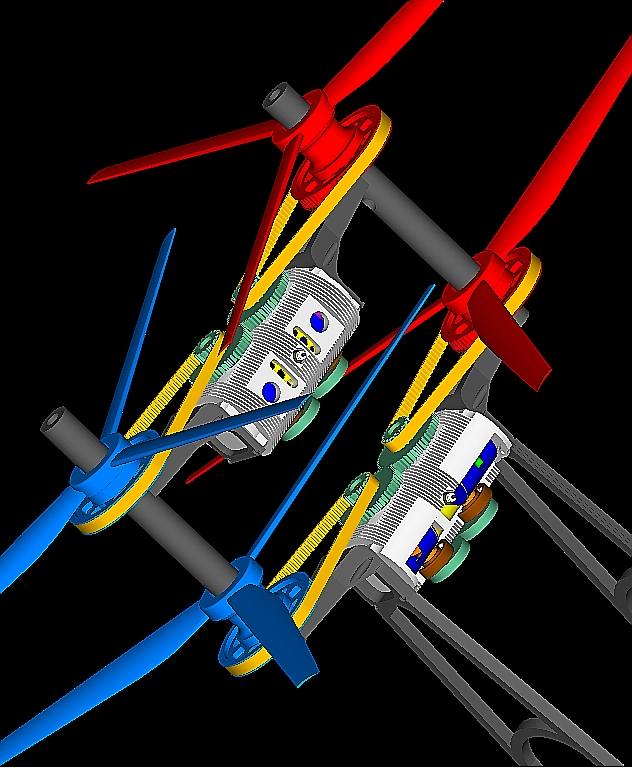
In conventional "contra-rotating" helicopter:
the support and driving of the top rotor is an issue. Also the control over the top rotor.
In a PatTol "contra-rotating" helicopter:
the support of the top rotor is easier and more robust / safe.
The engine(s) and the transmission can be arranged in the space between the contra-rotating rotors, or below the lower rotor, or even above the top rotor.
The fuel (for engines above the lower rotor) and the control (of engines and rotors) pass through the hollowed extension of the frame.
A rescue parachute can be stored in a cage secured at the top of the frame, above the top rotor.
In a PatTol Air-Crane:
the frame is a long mast whereon several hollowed-hub rotors are rotatably mounted (with each having, preferably, its own motor and transmission). At the bottom of the mast is a basket (fuselage) for passengers, or for cargo.
The big diameter rotors provide the required lift, the top motor/propeller is for the propelling the air-crane.
A rescue parachute, at top, is for safe landing in case of emergency.
Simple, cheap, robust, lightweight and safe, it suits for air-cranes, for fire-fighting, for rescuing people trapped in hazardous areas etc.
The following PatTol airplane / helicopter (likewise the Osprey V22) uses a main propeller with hollowed hub.
The frame extends from the fuselage to the area above the main rotor, wherein a wing, with two propellers, is secured.
During a vertical take off, the propellers provide the required reaction torque, while most of the power is provided to the main rotor.
Progressively the power to the main rotor reduces and the power to the propellers increases (with the pitch of the propellers aligned properly). The vehicle accelerates horizontally with more and more of the required lift provided by the wing.
Later, power is provided exclusively to the propellers. The main rotor gets to a stall and is secured on the frame at a position minimizing the aerodynamic resistance and improving the stability of the vehicle.
Etc.
Thoughts?
Objections?
Thanks
Manolis Pattakos