I'm trying to decipher the "mystery" of 400 km/h car in the qualys of Mans 89. Looking around the net there are many sources that claim different things, so my wish is to set the record straight 
Source #1, Bonhams auction of the chassis 05 (back in 2008) says the following;
At Le Mans Jean-Louis Schlesser, heading up the all French driver lineup gained the pole with a special qualifying chassis and engine in C9-02 thanks to a loophole in the regulations. This special chassis had been officially entered in the race and was replaced after qualifying with a record 407km/h top speed by chassis C9-05, designated for this occasion as the T-car. The only race in which this chassis had white rear view mirrors rather than the usual yellow ones.
This suggests;
Schlesser did the 407 km/h and gained pole with the "special chassis 02", used in qualys
T-car = chassis 05, used in race.
Source #2 - going to the major database at racingsportscar dot com, the top qualifying time is listed as follows;
62T - Sauber C9 chassis 02 (Schlesser, Jabouille, Cudini) - 3:15.040
And on results page for 1989 Mans qualys, 62T is listed as the fastest. But when you check the overview of Sauber C9 chassis at the Le Mans '89 it states the following:
62 = chassis 05, practiced only
62T = chassis 02, raced, finished 5th
62T raced and qualyd? Also, Bonhams auction says chassis 05 is the T-car, racingsportscar claims its the chassis 02.
Source #3 - Motor Sport Magazine, edition from July 1989, article Coventry Anti Climax
Schlesser had established the fastest time at 3 min 15.04 sec (249.826 kph)...Schlesser's time was set with the race car, but in a special trim for qualifying. On Wednesday evening he'd been five seconds quicker than Kenny Acheson in a similar car but Acheson was 27 kph faster down the straight, according to the radar trap. It sounded unlikely but the Mercedes engineers believed it, pointing out that Acheson's low-downforce car was 400 rpm faster than Schlesser's, which was tuned more for handling.
Now, on some french forum I found a comment, roughly translated to;
The little story is known, it was the Sauber N ° 62 who held the pole (Schlesser) but for the race, it is the 62T that took the start!
Source #4 - didn't order Silver Arrows by Ian Bamsey book yet - but on eBay there's a seller that sells one and one of the pages on his preview, page 106 says;
This was at 8:20pm and a short time later Mauro's fears were to come true as Schlesser at the wheel of No 63 (??) beat the Italian's time by a mere 0.63 secs. There was some consolation for the Acheson, Baldi & Branchatelli trio...........and at 7:32pm Acheson was timed at 248 mph on the Le Mans tour main road, the other two Saubers were times at 234 and 231 respectively for No 63 and No 62.
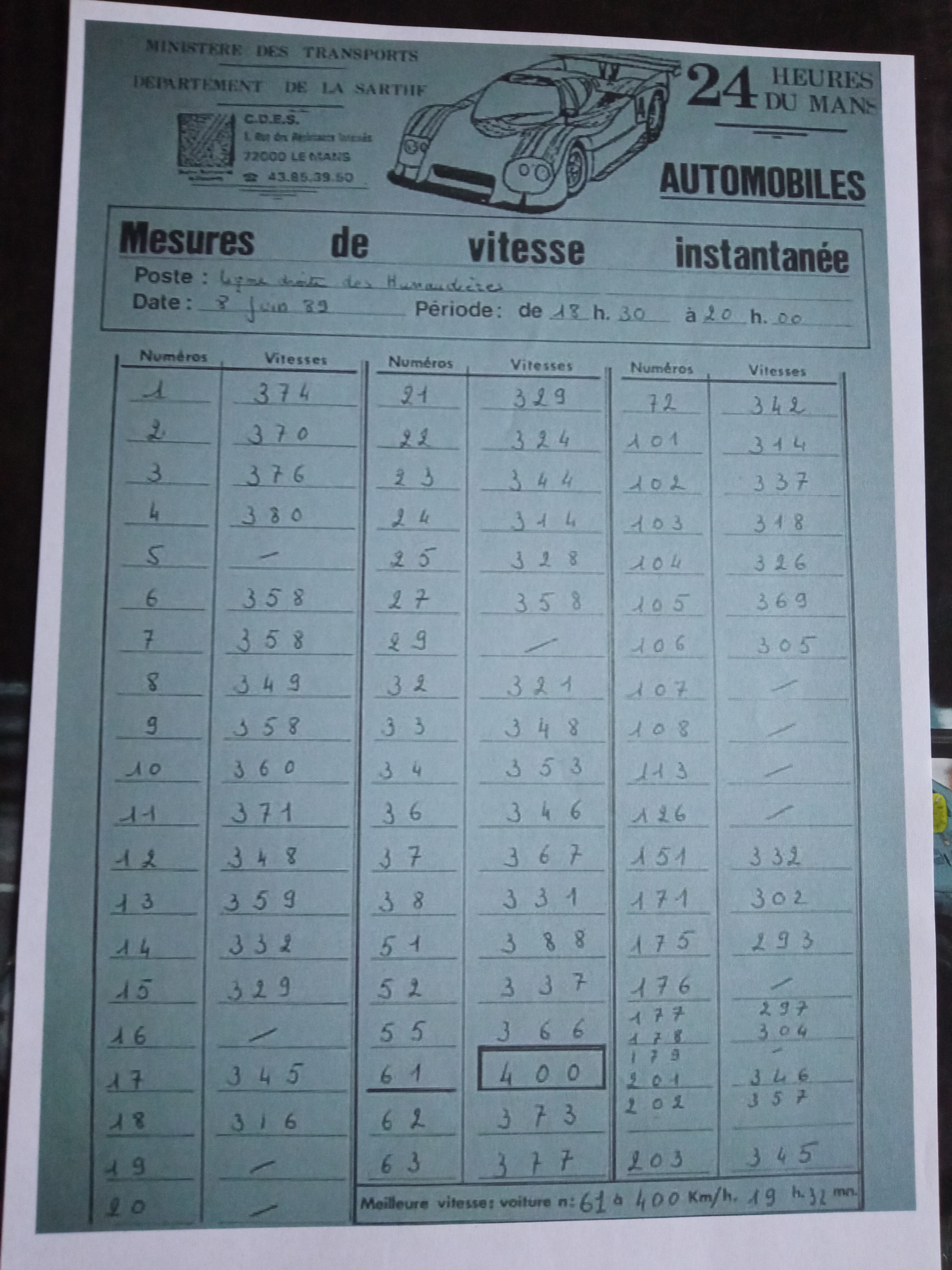
So, from the book of Sauber's insider at those times, it says that Acheson hit 400 km/h and Sauber 62 was going 371. Motor Sport Magazine (source #3 here) claims Acheson (car 61) was 27 kph faster than Schlesser. Now, Schlesser was definitely in 62, and the speed difference between 61 and 62 according to the book is 29 kph, and that's pretty much the same difference Motor Sport Magazine claims.
Source #5 - a scan from Rombo magazine recapping Le Mans 1989, probably a July issue.

As you can see here even if you don't understand Italian, the caption on the left mentions Baldi/Acheson #61 car (red mirrors) hitting 400, but then in the text you can see it mentioning Schlesser going 400 but on the "primo turno di prove" which would be the "first round of tests", not sure if it refers to qualys.
...so...which one is it, Schlesser of Acheson? I tweeted this question at Acheson, hope he sees it and clears this up once and far all
Edited by FTM, 12 April 2019 - 00:03.