I've been tuning some 'Mag' dampers lately. Has anyone else here played with them?


Tuning magneto-rheological dampers
Started by
Fat Boy
, Jul 08 2022 17:26
20 replies to this topic
Advertisement
#2

mariner
-

- 2,334 posts
- Joined: January 07
Member
Posted 09 July 2022 - 14:10
Well with that intro. you HAVE to tell us more!
I once had a chance to chat to Fave Dirkenhoff ( not sure on spelling) who was the lead developer of Magnaride at Delphi back in it's GM days.
A very helpful guy who explained it patiently to me , a techno dummy , despite his PhD.
One very interesting concept early on was " sky hook damping" i.e you define a point ( or rather a track ) in space for the vehicle body and use the dampers to continuously get back to that point. Basically a simpler version of active but using the springs energy to move thee body mass.
I don't know how far idea was developed but the idea was to improve ride of road cars on wavy as well as bumpy roads , not to improve cornering
#3
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 09 July 2022 - 21:25
Well, I was kind of hoping to read more than I wrote, but I guess I can at least share what I’ve found.
I’ve been playing round with Magneride OEM-style dampers and a stand-alone controller called a DSC which replaces the OE damper controller and communicates with the car computer through the CAN bus. The interesting thing about MR dampers is that you have to readjust how you think about your tuning. We need to make significantly fewer compromises with MR dampers because we can make act differently depending on the phase of any given corner. They’re constantly adjusting.
Through dyno testing or from the manufacturer, we get several ‘normal’ dyno curves which gives us the force generated w.r.t. shaft velocity while varying the input current. Let’s say we get 5 curves from 0-1000 milliamps in 200 ma intervals. This will give us an idea of the forces which we can produce. My information on this end has been pretty skinny. I’ve gotten a couple curves, which are not at the extremes of the range, but they give me a qualitative idea of where I stand.
As the car drives, the controller will be feeding each damper an input current based off various tuning parameters. The more current supplied, the stronger the magnetic field produced and the thicker the oil is which is trying to pass through the piston orifices. The dampers themselves are quite simple. They have a main piston with holes surrounded by magnet coils. The size of the holes dictates the base forces of the damper and the force/current relationship. I realize I’m probably not breaking any new ground here.
With the DSC, the base tuning parameter is the G-G plot. Using Lat & Long accelerations, we can infer where we are in the corner and then make our adjustments in that portion of the corner, only. We also have inputs which predict car behavior to a certain extent. Brake pressure, throttle input and steering inputs all have input modifiers which allow us to vary input currents to inertial events prior to them occurring. For instance, if one stomps on the brake pedal at 70 bar of pressure, then we better stiffen the front dampers, because this car is going to be doing a nose dive momentarily and we want to both limit brake dive and provide stability for corner entry. This will all occur in the time between when one slams the brakes and the car responds, which I find impressive. There is also a modifier for overall vehicle speed, which slightly nudges up damping as the speeds go up.
Here’s the real fun part of the game. I have *no idea* how the modifiers work to influence input current to the dampers. The controller distributor won’t say (I suspect they don’t know) anything about the algorithm. All I know is that all of these spices go into the soup and, in the end, we produce a damper force. Because of this, I tend to rely more on the base G-G map than the input modifiers for tuning. Just to give you an idea of what I’m talking about, here’s a screenshot.
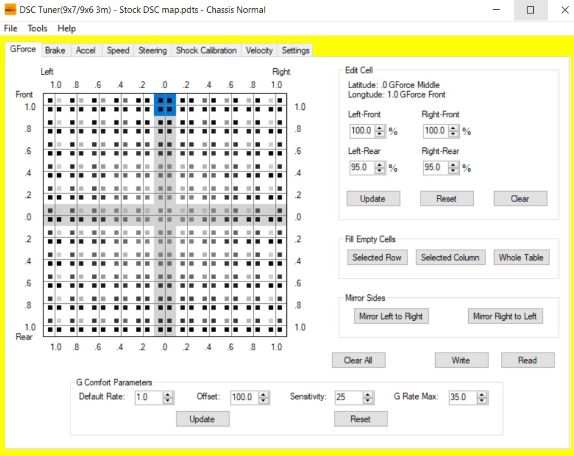
<BTW, putting images on this forum kinda sucks>
As you can see, the map is 1x1 G matrix in 0.2 G increments. Each increment has an input current percentage. 100% refers to the input current from our damper calibration (damper shaft velocity, input current & damper force). Just because we are reading 100% of the input current, that does not mean the damper will be making its maximum force. Our damper input currents do not necessarily extend to the extremes of the range possible, especially if maximum damper shaft speeds are not in play. Similar to an electric motor having max torque at zero rpm, we might have very high damper forces at low shaft velocities if we choose. There is a ‘hydraulic bump rubber’ function available which does this, but I’ve never really spent much time investigating its use.
At the bottom of the screenshot, you’ll see a box called ‘G Comfort Parameters’. This function essentially turns the dampers passive at low G-forces (eg. Normal driving). That ‘Default Rate’ box is the base damping. In this case, it constantly feeds the dampers 1% of the max input current. The ‘Offset’ seems like some sort of fudge factor that we don’t touch. ‘Sensitivity’ adjusts how quickly the controller will shift away from the base passive damping and start using the actual map. The ‘G Rate Max’ box is the acceleration level at which the map comes into effect. In this case, at 0.35 G, we’ll move away from base damping and onto the map.
When talking to some friends who do this for OE’s, they tell me that the variables I have to tune are about 30% of what they get from Magneride. Significantly, I have no term which is damper shaft acceleration or jerk. Apparently, OE’s have both. I also don’t have a way to independently influence compression or rebound alone. I can ramp up the input current due to the motion of the car, but that current cannot be varied based on the direction the damper is moving. I’m sure that this would tax the processor pretty hard and I doubt the damper could really keep up, specifically as we get to the higher frequencies.
So far, compared to the stock damper controllers, I have a bunch of happy ‘track day’ and autocross customers. None are really racing, but in back-to-back comparisons, the difference is a couple seconds to the good around a ‘normal’ racetrack compared to the OE stuff. The OE stuff, even in their ‘Track Mode’, is hopelessly under-damped and they don’t seem to appreciate the balance implications of active damping. I feel like the tuners spend all their time on the ride and damned little on the handling. At the very least, whatever they do is not very good on a racetrack.
Having made this criticism, I think what OE’s do on public roads is pretty impressive. There’s no way I can match their freeway ride. The OE’s are specifically good when driving over large amplitude, low frequency rolling bumps. I’m stuck on the ‘base’ portion of the map driving down the freeway, so whatever ‘base’ damping is in the car will be what I have. Those initial 1-5% numbers are junk. The car bounces like a pogo stick and takes forever to settle out. Ramp that up to 25 or 30%, and the manners improve significantly over the roller bumps, but now we start to feel the high-frequency content. We’re essentially back to the world of a passive damper. The OE’s can respond to those inputs way better than I can.
When tuning, the first thing I do is raise the input currents pretty significantly to give me some real damping forces. My map tries to manipulate the tire loads to provide the handling we need and I’ve found it to be surprisingly accurate. As I said before, I can’t adjust compression and rebound with respect to each other. I tend to run a fairly heavy compression bias with (passive) dampers, so my base damper curve reflects this. When I am tuning handling, I just consider the compression side of the damper (at least conceptually) and I adjust the balance through those means. For example, I had feedback that the car was developing an understeer off-throttle prior to the apex. I stiffen the fronts to maximum while braking and then roll off the front damping as the lateral forces build and longitudinal ones recede. To address the issue, I took an extra 5% out of the outside front damper/inside rear as it went to max lat G and I added 5% to the inside front/outside rear. For you oval guys, I took a little wedge out of it to let it turn. As soon as he goes to throttle, though, we move from the braking to the acceleration side of the map. There we can have the distribution back which allows for better traction. On track, the driver reported that his understeer in that portion of the problem corner went away and nothing else really changed.
It’s a basically an exercise of doing this all around the track. If one were actually racing with this arrangement, you could spend some serious rabbit-hole time trying to get a ‘perfect’ car (whatever the hell that is). I think we’d want probably a 2 or 3 G map and we’d have to have more variables and a tuning algorithm which is not a complete mystery. I have to say, though, for what this is, it has a lot of capability. I’ve only tuned on street car Magneride dampers to this point, but there is a company in Holland by the name of Tractive which produces a line of MR racing dampers. They look really nice, but we’re in no danger of me buying a set. Proper racing dampers come at proper racing damper prices, so they will stay on the shelf.
---------------------------------------------------------------------
So there’s my Saturday morning brain dump to get things going. I’m all typed out for the present.
#4
Greg Locock
-

- 6,367 posts
- Joined: March 03
Member
Posted 10 July 2022 - 00:17
Wow. Thanks for that. Yes they are very clever things. Unfortunately none of the vehicles I work on have them. You are right we spend very little time tuning shocks for handling, in fact none of the metrics we use when tuning shocks even mention handling. I can get fairly close to a production tune for shocks by simulation, but as always the precise details of buildable calibrations can't be modelled, at least the way we do it. There are proper simulations of shock absorbers, but even the manufacturers don't use them much in my experience.
#5
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 10 July 2022 - 02:38
Well with that intro. you HAVE to tell us more!
I once had a chance to chat to Fave Dirkenhoff ( not sure on spelling) who was the lead developer of Magnaride at Delphi back in it's GM days.
A very helpful guy who explained it patiently to me , a techno dummy , despite his PhD.
One very interesting concept early on was " sky hook damping" i.e you define a point ( or rather a track ) in space for the vehicle body and use the dampers to continuously get back to that point. Basically a simpler version of active but using the springs energy to move thee body mass.
I don't know how far idea was developed but the idea was to improve ride of road cars on wavy as well as bumpy roads , not to improve cornering
I can see that idea being used to keep an aerodynamic floor nice and flat, especially if you were allowed to use lasers for feedback. In the 'Porpoising' thread, active suspensions have been mentioned as a cure. That would be wildly overkill. All one would have to do is use MR dampers and go to maximum compression damping (which is practically solid) and zero rebound on the straights. The car would 'pump' itself to a higher ride height, just like you've suggested. Then, when you get to the corner, you shift it back to normal damping, let the chassis settle for a moment and you're in the corner.
I can understand the FIA not wanting to open this particular can of worms, but it's pretty impressive to see what can be done with a relatively simple system.
#6
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 10 July 2022 - 03:22
Wow. Thanks for that. Yes they are very clever things. Unfortunately none of the vehicles I work on have them. You are right we spend very little time tuning shocks for handling, in fact none of the metrics we use when tuning shocks even mention handling. I can get fairly close to a production tune for shocks by simulation, but as always the precise details of buildable calibrations can't be modelled, at least the way we do it. There are proper simulations of shock absorbers, but even the manufacturers don't use them much in my experience.
Dammit, Greg, you were supposed to be the one telling me what I'm getting wrong.
I don't know that I have a lot of faith in simulations for damper work. Dampers are just a little too complex of a thing for any sim I've seen to accurately model. A dyno curve allows me to calculate damping ratios and things like that, but I know it's only a rough idea of what will actually be happening on track. I've run track data with dampers on an EMA (electromagnetic) dyno. The crank dyno force curve is really just a suggestion. The mechanical and fluid dynamics of damper internals is a fun game to play, but you spend a lot of time scratching your head. Build 6 dampers with different designs but exactly the same force curves and you'll end up with 6 different reads on a racetrack. It's pretty crazy, sometimes.
In your situation, I think the only real way to do a good sim would be HIL. That's not really an option for me.
What I've done is pick a 4 points through a hypothetical corner: Pure braking, cross-loaded braking/turning entry, pure lateral, max lateral w/ low long acceleration. The first dictates braking stability. I run the fronts full stiff and the rear about 40%. This give plenty of platform to slow/reduce dive and the softer rear damping makes sure we don't have to worry about rear locking, but it's enough to control the rear pitch. As we turn into the corner with brakes, I can still leave a good amount of stiffness in the outside front if the car is prone to over-rotation, but I'll start softening the inside front for grip. I'll start to creep up the outside rear damping to get it to accept load at the correct rate and, depending on the balance of the car, I'll either stiffen or soften the inside rear. In the center of the corner, I'll have the front and rear at some level which gives the necessary mid-corner balance. I can shift steady-state balance around _a lot_, particularly by getting the car to mid-corner at the correct attitude. The drive off the corner will again depend on the car. If it's a traction limited car, I'll load the inside rear harder and if it's not so traction limited, I can load the outside harder to reduce understeer.
These are all things I do all the time, but usually I have to make compromises. OK, we can get you a little front grip in this corner, but we might cause some instability in that one or something like that. With this lash-up, I can give the front grip in one place and the stability in the other.
I kind of think these things might be in my future, so I've learned how it works and did basic map building on my car, and then used it on a bunch of other people's cars to help them. It's been a fun little side project.
#7
Greg Locock
-
- 6,367 posts
- Joined: March 03
Member
Posted 10 July 2022 - 06:31
One of the funnier exercises I did was to strain gage a shock and then plot shock force vs shock velocity as the car was driven over durability surfaces. I attempted to subtract out the mass effects, even so the resulting hairball plot really only looked like the measured f/v characteristic if you squinted and crossed your fingers. Wheel vertical velocities on these roads are anything up to 7 m/s, our shock dyno gets grumpy at 3, and they only routinely use 1500 mm/s. After each lap, which takes 5 minutes at most, they take the car through a water bath to cool the shocks.
On the other hand we have got quite a good way of modelling 5 of the 6 metrics we use to assess primary ride. It uses scanned road profiles. It is (slightly) silly to be using a 600 dof multibody model for primary ride, admittedly, and we have other ways of doing it.
i was wrong about not using the shocks for handling. We have the infamous ISO B double lane change maneuver (elk test) which we are not allowed to fail even if the ESC is inoperative. Once to pass we needed more front bar, but if we hit 34mm it's all over red rover, after that it is just bending the subframe, there's no real increase in roll stiffness. So the only way through was more compression damping. Nasty, but it worked.
#8
mariner
-
- 2,334 posts
- Joined: January 07
Member
Posted 10 July 2022 - 12:29
Having made this criticism, I think what OE’s do on public roads is pretty impressive. There’s no way I can match their freeway ride. The OE’s are specifically good when driving over large amplitude, low frequency rolling bumps.
I think they may be using the "skyhook" concept Dave D. described to me when I talked to him long ago.
As thought dampers get hot including Magaride ones, and as Greg describes above. So one approach would be to drive the car round the same lap with a temperature sensor on each shock and note the temperature levels each, say second. for each shock.
You would hope that as the track pattern is fixed the temperature read out's would indicate how much each damper works which MIGHT be measure of it's benefit to handling. In a way that is like the " grip index" used on shaker rigs by peole like Multimatic.
A Multimatic engineer who gave talk the the 750 Club claimed her could you which OEM car was on test just by the rig output traces witout ever seeing the actual car..
Edited by mariner, 10 July 2022 - 12:30.
#9
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 10 July 2022 - 22:11
One of the funnier exercises I did was to strain gage a shock and then plot shock force vs shock velocity as the car was driven over durability surfaces. I attempted to subtract out the mass effects, even so the resulting hairball plot really only looked like the measured f/v characteristic if you squinted and crossed your fingers. Wheel vertical velocities on these roads are anything up to 7 m/s, our shock dyno gets grumpy at 3, and they only routinely use 1500 mm/s. After each lap, which takes 5 minutes at most, they take the car through a water bath to cool the shocks.
On the other hand we have got quite a good way of modelling 5 of the 6 metrics we use to assess primary ride. It uses scanned road profiles. It is (slightly) silly to be using a 600 dof multibody model for primary ride, admittedly, and we have other ways of doing it.
i was wrong about not using the shocks for handling. We have the infamous ISO B double lane change maneuver (elk test) which we are not allowed to fail even if the ESC is inoperative. Once to pass we needed more front bar, but if we hit 34mm it's all over red rover, after that it is just bending the subframe, there's no real increase in roll stiffness. So the only way through was more compression damping. Nasty, but it worked.
I generally run my dampers to 250 mm/sec. They'll see instances of 2-3x that on track, but this does cover 99% of their running time. Like I said earlier, I really think a crank dyno is better used as a check to verify the damper was built correctly, as opposed to a tool for scientific development. I suppose I'm being a little dismissive, because, what they do, they do well.
When I think about a test like you describe, I think of a chicane. In the scenario you present, front low speed compression damping would be one of the first places I'd go, but I'm not educated in how much that affects ride characteristics. I can tell you that low frequency chassis inputs generally respond well to increasing low speed damper forces (eg. reducing bleed flow), but the additional damping forces might be objectionable to the passengers. Read my description above of phase 2. I keep that outside front damping as stiff as I can as long as I can, but, eventually, it will cause understeer. It's very important to me that my driver have confidence in the rear of the car to turn the wheel with as much aggression as necessary. If my driver ever starts going to finger-tips, I know right away the car lacks stability.
It's very important that the driver turn the wheel with confidence, because this will influence the line and balance of the car. A confident driver will turn the wheel late and aggressive, which induces a rotational moment which helps turn the car. He has less steering at the apex because of the more advantageous entry and an earlier throttle application due to the early rotation. A timid driver will turn in early and soft. He'll reach the clipping point of the apex with very little in the way of turning done. At the apex, he's winding in too much steering and still slowing the car. As he gets to about 2/3rds of the way through the corner, he's trying to go to throttle. He's over-slowed the middle and late to the throttle. He still has a ton of turning to do, so he's gently trying to feel throttle and steering lock into the car until the moment the rear tires finally spin (often in unison) and our massive mid-corner understeer turns into a snap oversteer at exit and all the while, the stopwatch continues to run. To turn with confidence, a driver has to be able to feel the car will respond an appropriate amount for a given input and that the car and tire are able to respond at a rate as great, if not greater, than what will be asked of it. (These are qualities I look for when discussing stability)
As long as I make grip, my passenger doesn't gripe about the ride, much. When I'm in the situation of not being able to adjust dampers, I really have my hands tied. It's actually a good exercise, because it reminds me of other ways to shift balance.
Edited by Fat Boy, 10 July 2022 - 22:12.
#10
gruntguru
-

- 7,642 posts
- Joined: January 09
Member
Posted 10 July 2022 - 22:12
Having made this criticism, I think what OE’s do on public roads is pretty impressive. There’s no way I can match their freeway ride. The OE’s are specifically good when driving over large amplitude, low frequency rolling bumps.
I think they may be using the "skyhook" concept Dave D. described to me when I talked to him long ago.
As thought dampers get hot including Magaride ones, and as Greg describes above. So one approach would be to drive the car round the same lap with a temperature sensor on each shock and note the temperature levels each, say second. for each shock.
You would hope that as the track pattern is fixed the temperature read out's would indicate how much each damper works which MIGHT be measure of it's benefit to handling. In a way that is like the " grip index" used on shaker rigs by peole like Multimatic.
A Multimatic engineer who gave talk the the 750 Club claimed her could you which OEM car was on test just by the rig output traces witout ever seeing the actual car..
Damper fluid temperature would be a useful parameter to feed back to the controller - help reduce the temperature sensitivity. No doubt they do that.
#11
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 10 July 2022 - 23:09
Greg, how much does your group take flat-ride into consideration when choosing spring rates? It's not a thing in my world, but is seems to me that a lot of street cars are made quite rear stiff. I can only assume that is the ghost of Maurice Olley rattling his chains?
#12
Greg Locock
-
- 6,367 posts
- Joined: March 03
Member
Posted 11 July 2022 - 00:02
Flat ride criterion is fundamental to the initial tune, but then reality intervenes. Rules of thumb in a vehicle program: weights will always increase. CG height will always increase. You'll always lose understeer. Fighting to get back understeer can result in some quite substantial rework.
Flat ride means you want the rear ride frequency higher than the front, but then for RWD and understeer you want front wheel rates higher than the rear, and for cost reasons and understeer you'd like to blow the useless rear bar away and up the springrates and for marketing reasons you need to keep the rear bar so to get traction you drop the rear spring rates. And so it goes. As it happens the last 6 car like objects (I now work on truck like objects) I worked on all had rear corner frequencies higher than the front, so it certainly looks as though Olley was onto something. Pitch, measured via an accelerometer on the roof, is a biggish deal.
Funny you should mention fingers on the steering wheel. That's how I always felt driving the original Esprit. The Peter Stevens redesign (X180) had gobs full of understeer dialled in to get around that, but the reason ride and handling could do that was due to me stuffing around (for other reasons) with chassis stiffness, so they could actually get the shocks and bar to work properly. My mechanic came back from his first lap in the modified car and said, be careful, it is very different. I only ever drove it at 5/10 so didn't really think much about it.
#13
mariner
-
- 2,334 posts
- Joined: January 07
Member
Posted 11 July 2022 - 07:57
I remember reading that Dr Fred Lanchester who designed his cars from first principles, set the cyclic frequency of the suspension to match the natural walking gait of a human.
A paper on walking gait is here
https://www.research..._people_walking
He was what would call today a polymath
https://en.wikipedia...k_W._Lanchester
#14
Magoo
-

- 3,723 posts
- Joined: October 10
Member
Posted 11 July 2022 - 10:31
Fascinating, FB. Thanks for sharing.
#15
Almag
-

- 28 posts
- Joined: June 07
New Member
Posted 13 July 2022 - 07:04
This discussion is outstanding. Thank you, Fat Boy and Greg L.
#16
Magoo
-
- 3,723 posts
- Joined: October 10
Member
Posted 13 July 2022 - 10:33
I remember reading that Dr Fred Lanchester who designed his cars from first principles, set the cyclic frequency of the suspension to match the natural walking gait of a human.
A paper on walking gait is here
https://www.research..._people_walking
He was what would call today a polymath
A genius for sure. His two works on aeronautics are astounding.
#17
Nathan
-
- 7,106 posts
- Joined: February 00
Member
Posted 13 July 2022 - 13:36
<BTW, putting images on this forum kinda sucks>
Having recently done this myself, I genuinely appreciate the effort putting the pic up for us.
#18
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 16 July 2022 - 18:48
I remember reading that Dr Fred Lanchester who designed his cars from first principles, set the cyclic frequency of the suspension to match the natural walking gait of a human.
A paper on walking gait is here
https://www.research..._people_walking
Weird, because the paper has people walking at ~2 Hz frequency, but most car companies seem hesitant to venture beyond a 1 Hz ride. I'm not aware of any OE road car even approaching a 2 Hz ride frequency (but maybe they're out there).
Regardless of the logic of Lanchester's approach (which is a satisfying one), it's not something which could be used in a racing situation, because it adds a constraint which is not performance related.
#19
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 17 July 2022 - 00:49
Flat ride criterion is fundamental to the initial tune, but then reality intervenes. Rules of thumb in a vehicle program: weights will always increase. CG height will always increase. You'll always lose understeer. Fighting to get back understeer can result in some quite substantial rework.
Flat ride means you want the rear ride frequency higher than the front, but then for RWD and understeer you want front wheel rates higher than the rear, and for cost reasons and understeer you'd like to blow the useless rear bar away and up the springrates and for marketing reasons you need to keep the rear bar so to get traction you drop the rear spring rates. And so it goes. As it happens the last 6 car like objects (I now work on truck like objects) I worked on all had rear corner frequencies higher than the front, so it certainly looks as though Olley was onto something. Pitch, measured via an accelerometer on the roof, is a biggish deal.
Funny you should mention fingers on the steering wheel. That's how I always felt driving the original Esprit. The Peter Stevens redesign (X180) had gobs full of understeer dialled in to get around that, but the reason ride and handling could do that was due to me stuffing around (for other reasons) with chassis stiffness, so they could actually get the shocks and bar to work properly. My mechanic came back from his first lap in the modified car and said, be careful, it is very different. I only ever drove it at 5/10 so didn't really think much about it.
Greg, you say that the accelerometer on the roof shows that a flat-ride spring lash-up is a ‘biggish deal’. Here’s a question for you. Is it a bigger deal for the accelerometer on the roof than it is for passengers in the seat? We tend concentrate on things which we can easily measure. Does dropping the rear spring rate actually produce negative passenger feedback or is it just easy to see you’ve induced more of a pitchy-bounce as opposed to a bouncy-pitch as the car trundles down the road? I’ve tested it on my personal car and prefer a rear which is more compliant over bumps even though I can feel the (to me minor) ride ‘pitchiness’ introduced when driving on poorly maintained roads. I realize I’m an extreme oddball in this regard, but it’s a fair question to ask about the evolution of design bogeys.
RCVD made it a point to discuss flat ride spring rates and I tried to use the approach a couple times. The car I tried it on was particularly flexible in the back ½ of the chassis, so it tended to run relatively high spring rates on the rear, naturally. Further, it was a car which had more aero and tire than engine, so wheelspin wasn’t a massive problem. Even then, I could never get it competitive when sticking to a rear-stiff spring lash-up. In truth, I don’t know if I’ve ever had a competitive car which had a R/F ride freq. ratio over unity. Most of the time, it’s more like 0.8-0.9. Flat-ride requires something along the lines of 1.1 or greater.
If we try to use flat-ride springs on a race car, we’re either going to end up under-springing the front, over-springing the rear or accepting some combination of both. Before concerning ourselves with any dynamics, we need to address the statics of the situation. Roughly speaking, we expect our road race car to produce braking (negative) accelerations about twice what we see for forward (positive) acceleration. This reality alone is a big determining factor in choosing spring rates. Longitudinal load transfer is a function of CG height, wheelbase and acceleration. If we vary the acceleration, we will vary the load transfer. Flat Ride criteria encourages us to stiffen the end of the car which receives the lesser amount of load transfer and soften the end which receives the greater. From that perspective alone, I find it a bit of a tuning cul-de-sac.
-----------------------------------------------------------------------------------------------------
I had a friend with an Esprit, but I never drove it (I’m not sure it ever ran…but, I digress).
When I was a kid, I felt like I wasn’t going fast if I wasn’t driving with my fingertips and a fair bit of sawing back and forth. It’s a common sentiment, but absolutely incorrect. If there is any car handling trait which limits driver aggressiveness on corner entry, then that must be addressed first. A confident driver drives with his fists on the wheel because the car is communicating to him and he can predict its movements. Road car drivers almost never drive hard enough on a corner entry to produce a meaningful slip angle distribution. Race drivers always do. A good driver might come back and say it’s OK, but there will always be some balance tendency because the car will always be driven to the point that where it matters. My default position is towards understeer. Most cars will tend to be forgiving of an excess of understeer because the confident racing driver can manipulate the load transfer to their advantage to make the car turn. As the car gets faster and more aerodynamically dependent, this zone of trail-braking for which balance might be manipulated becomes smaller and the disadvantage of having to do so becomes larger. Both balance and stability become more important when we start really flirting with limit thresholds.
I’ve spent a fair bit of time thinking about the concept of stability because I feel that much of what people are calling handling imbalances are often more related to the stability of the system as opposed to the actual F/R slip angle imbalances. I conceive of stability on a vertical ‘Y’ axis which crosses the under/over-steer ‘X’ continuum. A race car can be stable with oversteer or stable with understeer. To me, we’re evaluating the quality of predictability. Does the car do what the driver expects? We can’t just wind in a bunch of understeer and call that ‘stable’, because, when a <race> driver turns the wheel, he expects the car to turn. Further, an understeer in the middle of the corner will often turn into a snap-loose condition at exit, so an excess of understeer is no guarantee of any form of stability later in the corner. With lower horsepower cars, we have to reduce cornering drag, especially in fast corners. These cars will often have high yaw angles, but they do so in a predictable manner. This might become an issue in tire degradation, but it’s not one in terms of driver confidence. Our aim with any car is to keep the car in quadrant 1 and 2 on our stability/balance grid. The lap time differences between very good drivers will often vary more from the stability of the car than it will from the balance. They will all be able to accommodate balance differences to one extent or another, but instability tolerance varies. As engineers, we need to be honest about whether our ‘good’ driver is displaying a stability tolerance or just one for risk. They run in similar circles. I tend to err on the side of understeer on newer tires, because cars will usually go to oversteer as the tires degrade, specifically if the car is putting excess heat in the rears from the start of the run.
-------------------------------------------------------------------------------------
OK, so that was this Sunday’s brain dump.
Advertisement
#20
Greg Locock
-
- 6,367 posts
- Joined: March 03
Member
Posted 17 July 2022 - 07:43
I don't think Milliken says to use flat ride on race cars, he specifically says that you need to keep the rear axle soft in the context of RWD. I'd guess if you follow that argument to the ultimate conclusion you want the front soft for braking and the rear soft for accelerating and then you've got Mr Bouncy.
Accel on the roof is used for pitch because it is cheap and easy. Obviously i'd rather we used (roof x- floor x)/z, if we are sticking with accelerometers but those as make the decisions say that roof correlates OK with subjective - which a cynic might interpret as meaning our trained evaluators (I am not one for primary ride) have taught themselves to be responsive to roof x. It probably isn't quite that bad but I bet there is a bit of that.
#21
Fat Boy
-
- 2,594 posts
- Joined: January 04
Member
Posted 19 July 2022 - 00:29
I guess I kinda harped on flat-ride there. I didn't really set out to do that. I guess that's what happens with a brain dump. FWIW, I definitely see appreciate its attributes; I just can't take advantage of them.








